Sensor Fusion Architecture
An architecture animation following RFID, ANPR, LiDAR, 4D radar and CCTV through tracking, association, classification, violation and transaction engines.
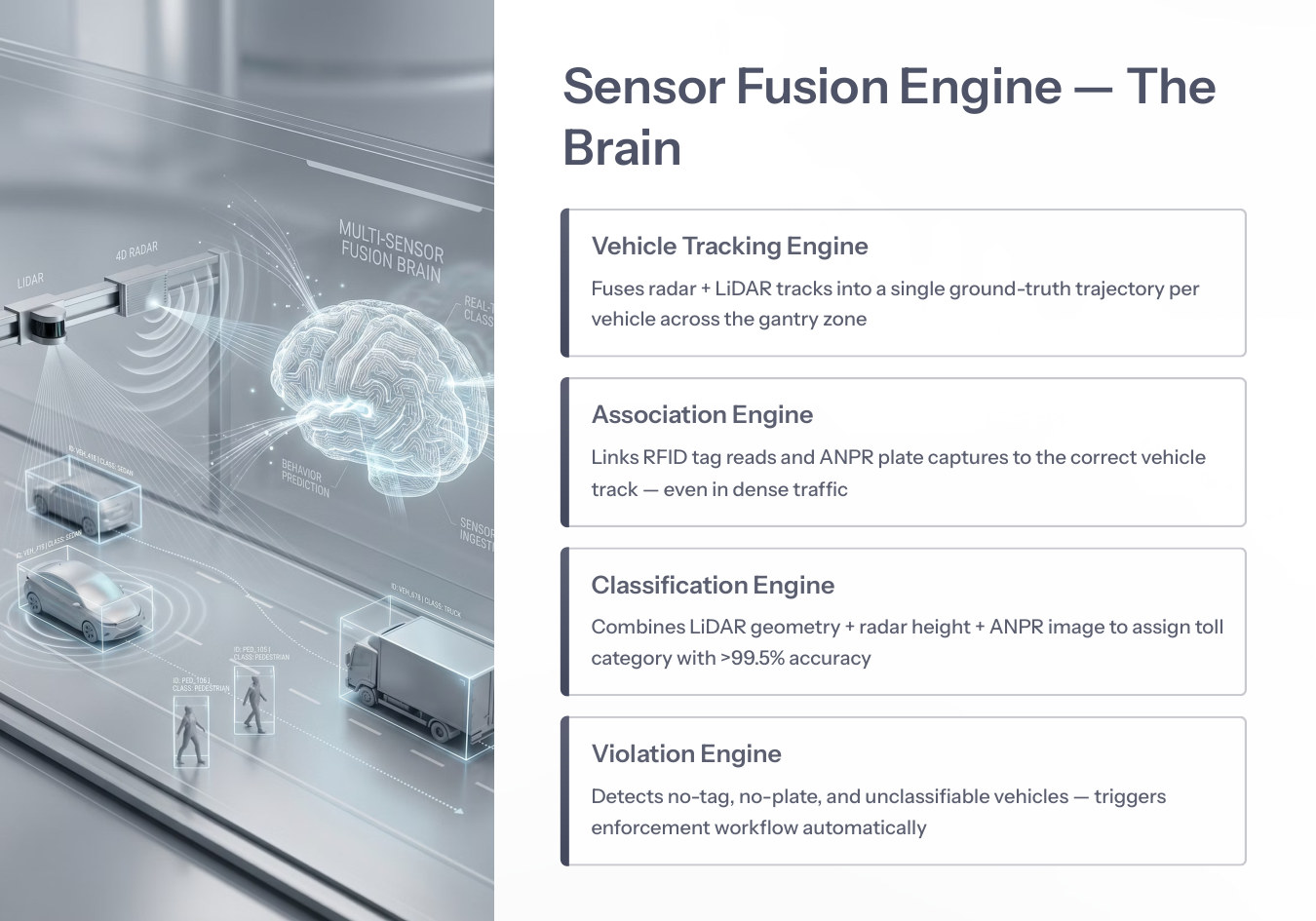
RITAIS fuses RFID, ANPR, LiDAR and 4D radar into a single vehicle record with track ID, identity, class, evidence and confidence score.
RFID identifies the account, ANPR identifies the plate, radar tracks motion and LiDAR validates geometry. Fusion compensates when one sensor degrades.
An architecture animation following RFID, ANPR, LiDAR, 4D radar and CCTV through tracking, association, classification, violation and transaction engines.
An architecture animation following RFID, ANPR, LiDAR, 4D radar and CCTV through tracking, association, classification, violation and transaction engines.
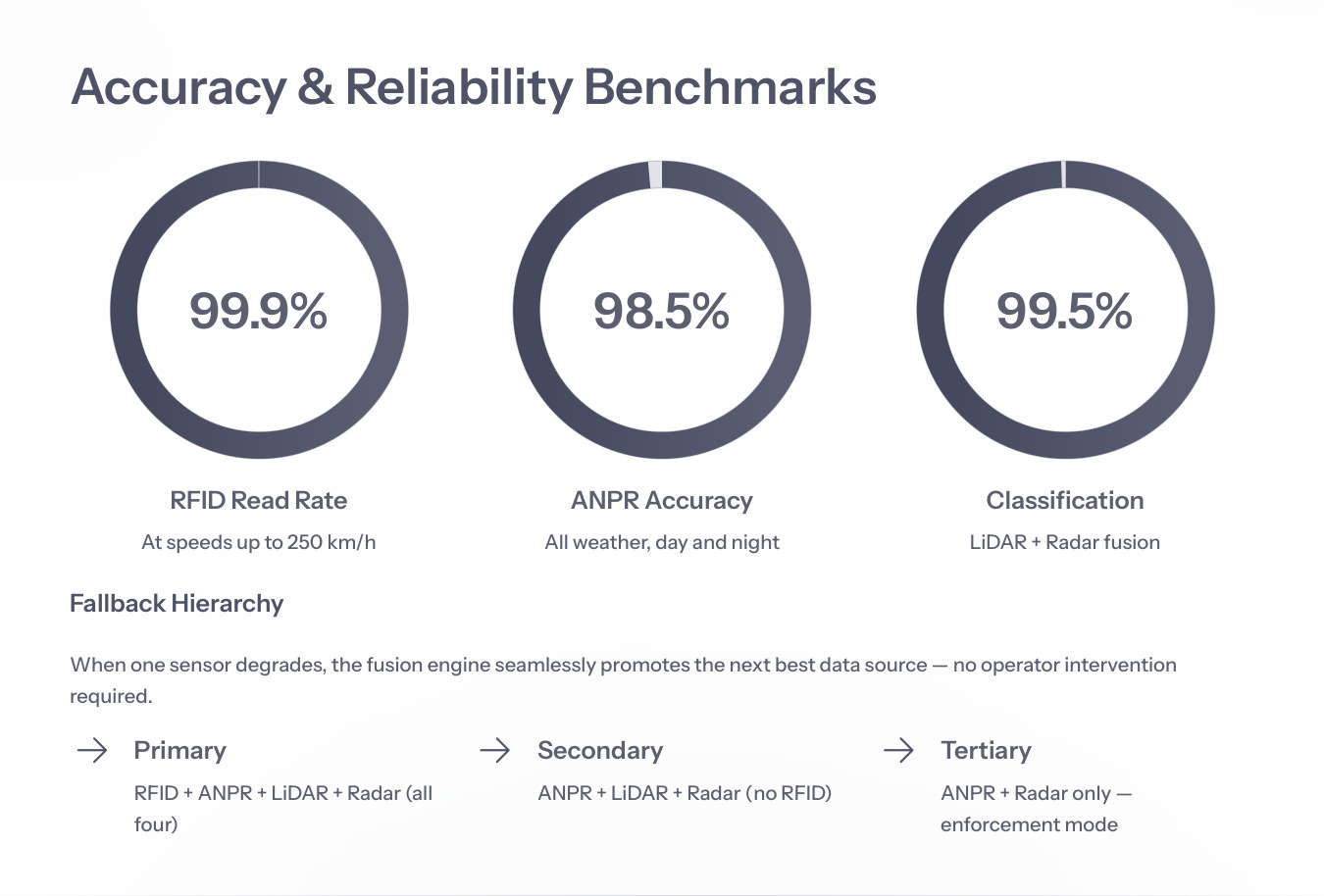
When one sensor degrades, the fusion engine promotes the next best evidence combination instead of requiring operator intervention.
Lane changes, occlusions, weather degradation and violation proof all require more than a tag or a plate image.
View Use Cases