LiDAR Deep Dive
A technical film demonstrating laser scanning, point-cloud generation, vehicle separation, height mapping, axle estimation and classification.
RITAIS treats LiDAR as a primary classification engine for MLFF, not as a supplementary camera.
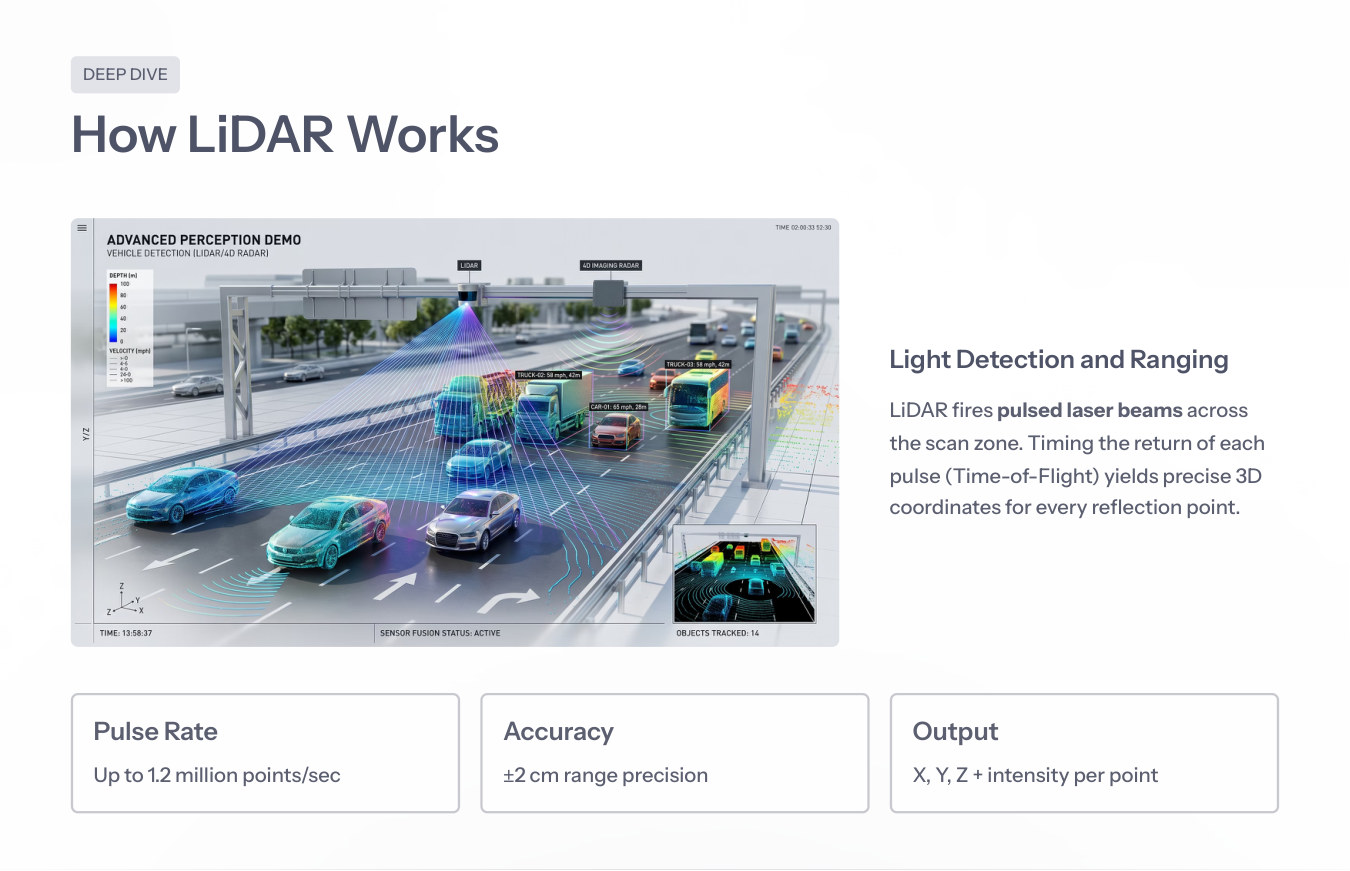
LiDAR fires pulsed laser beams across the gantry zone. By timing the return of each pulse, the system produces precise 3D coordinates for every reflection point.
Up to 1.2 million points per second.
Centimeter-level distance measurement for vehicle profile analysis.
X, Y, Z plus intensity per return point.
A technical film demonstrating laser scanning, point-cloud generation, vehicle separation, height mapping, axle estimation and classification.
A technical film demonstrating laser scanning, point-cloud generation, vehicle separation, height mapping, axle estimation and classification.

LiDAR is indispensable because tolling class is a geometry problem: vehicle height, length, width, axle grouping and separation matter. It complements radar trajectory and ANPR identity.
Continue to Sensor Fusion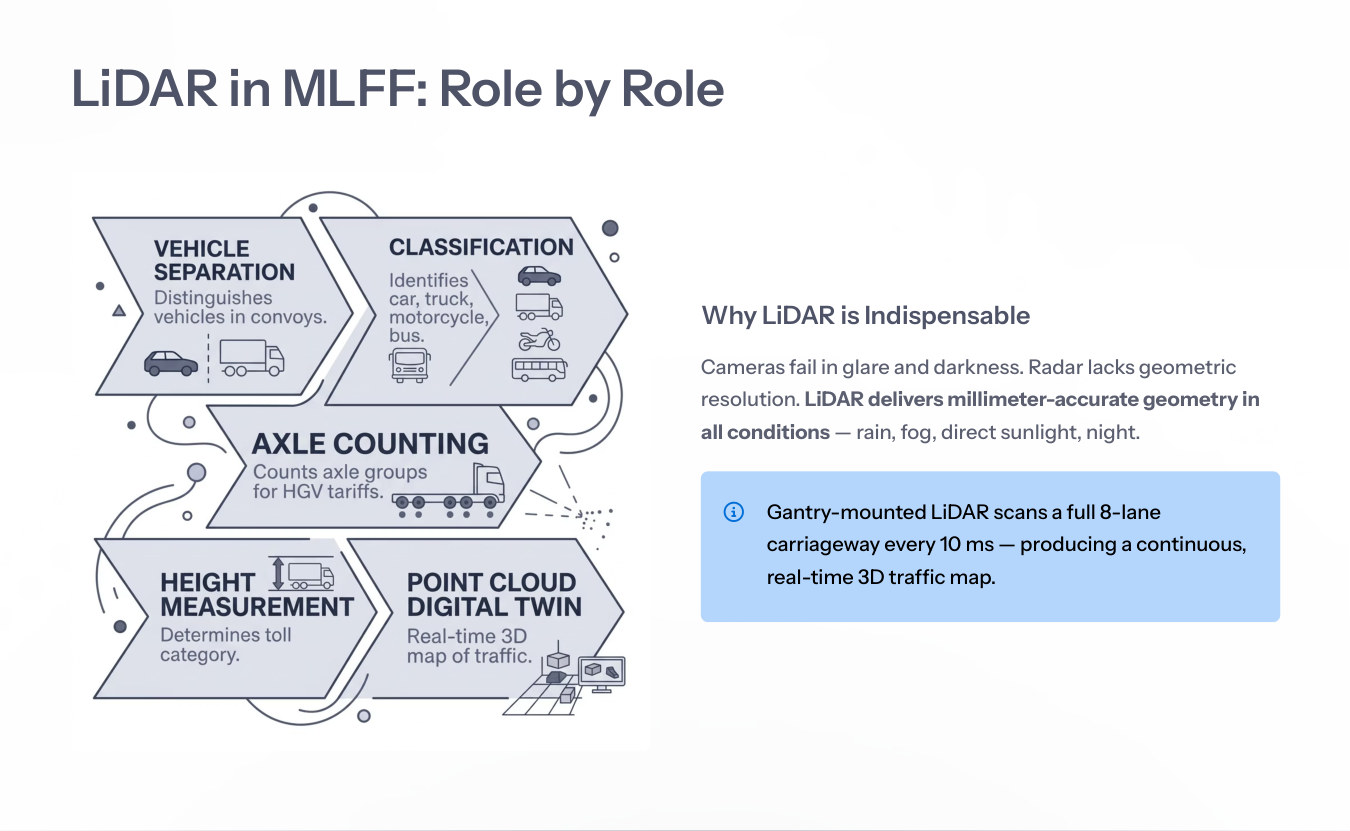
| Value | Meaning |
|---|---|
| X | Lateral position across lane. |
| Y | Longitudinal position along road. |
| Z | Height above road surface. |
| Intensity | Surface reflectivity or material response. |