4D Radar Explained
A technical explainer covering multi-target tracking, lane changes, occlusion recovery, speed estimation and all-weather operation.

4D radar provides range, azimuth, elevation and Doppler velocity, allowing RITAIS to maintain target identity where single-sensor systems fail.
Legacy radar often measures presence and speed. 4D radar adds elevation and multi-target separation, making it a core MLFF sensor rather than a speed-only device.
Distance to target before, under and after the gantry.
Lateral position across lanes for lane association.
Height dimension used to separate vehicle types and structures.
Instantaneous speed per target for prediction and tracking.
A technical explainer covering multi-target tracking, lane changes, occlusion recovery, speed estimation and all-weather operation.
A technical explainer covering multi-target tracking, lane changes, occlusion recovery, speed estimation and all-weather operation.
Maximum vehicle speed tracked.
Simultaneous vehicles per sensor.
Doppler velocity resolution.
Detection range ahead of gantry.
Radar maintains performance in rain, dust, fog and darkness, providing continuity when cameras or LiDAR degrade.

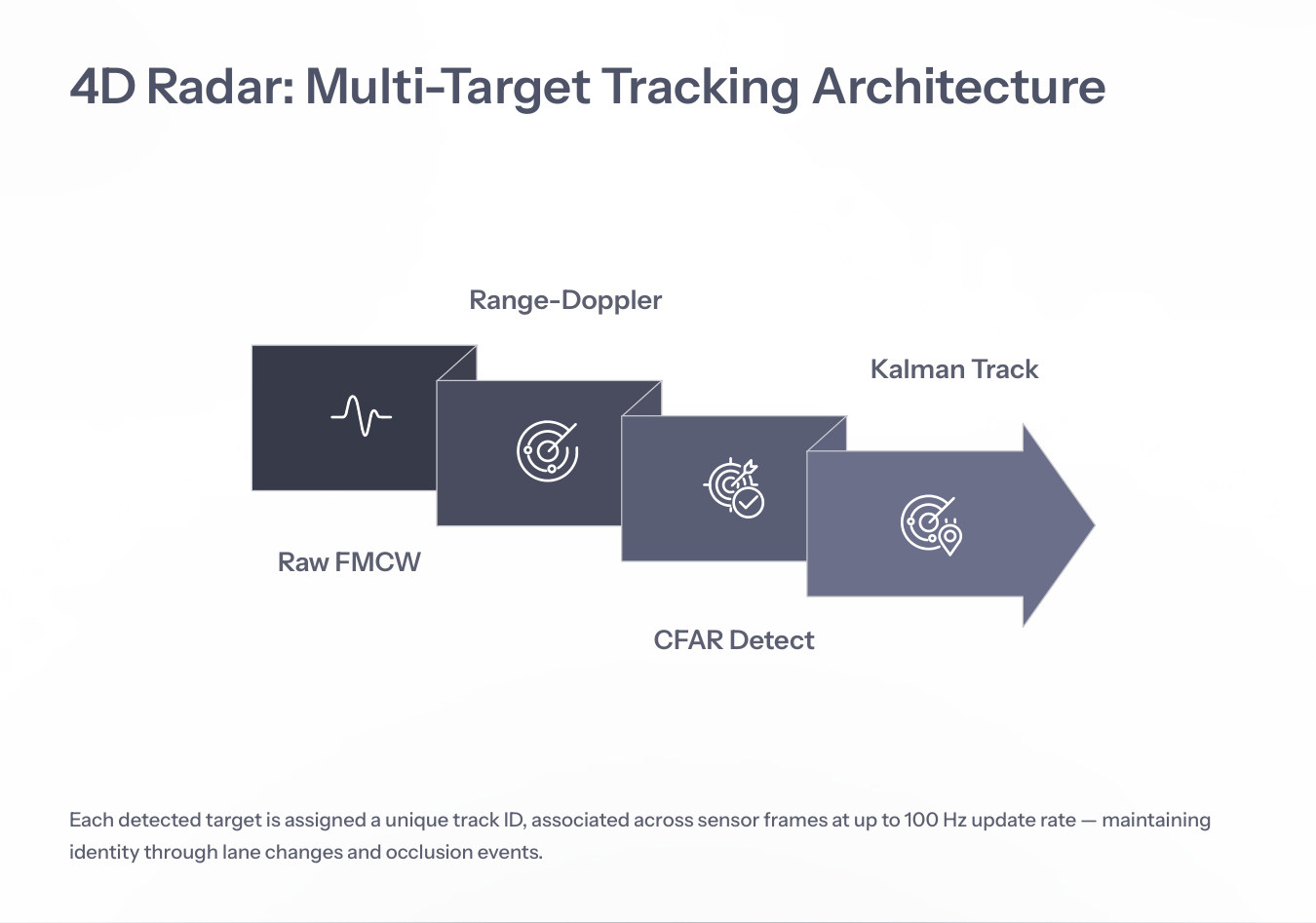
Each detected target receives a track ID that is associated across sensor frames, enabling identity preservation through lane changes, occlusions and dense traffic movement.
See Use Cases